已开新文章,空白工程链接文章中。...
这是一个留言本,有什么想说的可以留言在这里哦。 ...
还有 5 人发表了评论 加入20197人围观这是一个留言本,有什么想说的可以留言在这里哦。 ...
还有 5 人发表了评论 加入20197人围观
 yanguo 发表于2024-01-25 浏览2941 评论0
yanguo 发表于2024-01-25 浏览2941 评论0在ROV水下任务中,ROV的APM控制器需要和地面站QGC进行通信,APM控制器和QGC地面站使用同一PC时,APM飞控可以通过USB串口插在主机上直接和QGC通信。但由于ROV采用了TDA4VM作为机载计算机,无法在ROV端运行QGC,所以需要使用MavProxy作为代理将USB串口的Mavlink数据发送到同一局域网内PC的QGC端,这样就实现了通过网络控制远程的APM控制器,也就是通过地面站控制水下ROV。
 yanguo 发表于2023-10-18 浏览1931 评论0
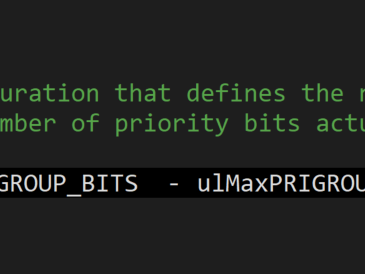
yanguo 发表于2023-10-18 浏览1931 评论0STM32CubeMX配置FreeRTOS问题,程序卡死在configASSERT( ( portMAX_PRIGROUP_BITS - ulMaxPRIGROUPValue ) == configPRIO_BITS );
 yanguo 发表于2023-09-15 浏览1472 评论0
yanguo 发表于2023-09-15 浏览1472 评论0本文内容为利用ubuntu固定IP地址,实验环境为ubuntu x86 64位,vmware 16 pro,主要使用到的工具有:Bash VMware vim 。
 yanguo 发表于2023-08-15 浏览1468 评论0 yanguo 发表于2023-07-31 浏览1182 评论0
yanguo 发表于2023-08-15 浏览1468 评论0 yanguo 发表于2023-07-31 浏览1182 评论0链接:https://pan.baidu.com/s/1htWV-ErztdieCTYF_p5dBw?pwd=1234
提取码:1234
–来自百度网盘超级会员V5的分享
 yanguo 发表于2023-04-06 浏览5101 评论0
yanguo 发表于2023-04-06 浏览5101 评论0为了能够在工作站上可以访问到外部网络的资源,可以使用wireguard配置连接Surfshark服务端,这样就是直接在服务器访问外网。
 yanguo 发表于2023-03-12 浏览1717 评论0
yanguo 发表于2023-03-12 浏览1717 评论0 yanguo 发表于2023-02-15 浏览1188 评论0
yanguo 发表于2023-02-15 浏览1188 评论0 yanguo 发表于2023-02-05 浏览1790 评论0
yanguo 发表于2023-02-05 浏览1790 评论0(一)在windows端生成密钥
===================
本地输入命令:
<pre class="prism-highlight prism-language-bash">ssh-keygen
 yanguo 发表于2023-02-04 浏览845 评论0
yanguo 发表于2023-02-04 浏览845 评论0